La grande majorité de la R&D sur les motos consiste à apporter des améliorations progressives à la technologie existante, mais de temps en temps les fabricants laissent libre cours à l’imagination de leurs concepteurs – et des créations farfelues se produisent.
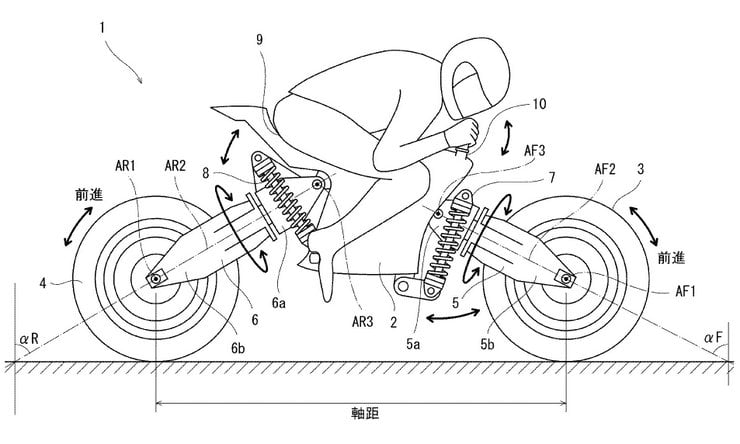
Il s’agit d’une nouvelle demande de brevet de Kawasaki, montrant une moto qui pourrait avoir deux roues et une position de conduite inclinée vers l’avant. Jusque-là, rien d’exceptionnel. Mais mis à part ça, elle renonce à pratiquement tout le reste que nous connaissons. Il n’y a pas de guidon mobile, par exemple. Au lieu de cela, le pilote tient un guidon fixe qu’il peut utiliser pour passer son corps d’un côté à l’autre de la moto. La direction n’est pas obtenue en tournant la roue avant de manière conventionnelle mais en déplaçant le poids du pilote d’un côté à l’autre. Des capteurs sur la moto enregistrent la répartition du poids et activent des moteurs électriques qui peuvent faire pivoter les roues avant et arrière et leurs bras oscillants sur un axe allant dans le sens demandé. Cela semble compliqué, et ça l’est, mais l’image ci-dessous montre comment les roues se déplacent par rapport à la moto dans les virages. Fondamentalement, la roue avant s’incline beaucoup plus loin que l’angle d’inclinaison de la moto elle-même, tandis que la roue arrière pivote dans l’autre sens afin qu’elle reste plus droite que le reste de la moto. En théorie, cela fera tourner la moto.
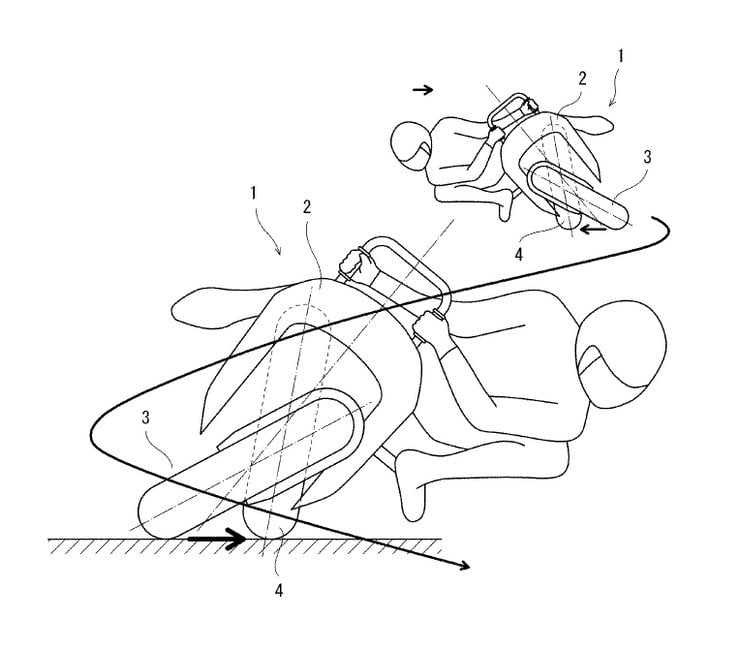
Les roues s’inclinent indépendamment de la moto elle-même, prenant des angles étranges lors des virages.
De toute évidence, l’utilisation de roues qui adoptent des angles d’inclinaison différents de ceux de la section principale de la moto pose un problème lorsqu’il s’agit de conduire. Une chaîne ou une courroie sauterait directement de ses pignons, la solution de Kawasaki consiste donc à utiliser des moteurs électriques intégrés aux roues, alimentés par une batterie située dans la section principale de la moto. Les roues avant et arrière contiennent des moteurs, ce qui en fait une machine à deux roues motrices, et la batterie principale alimente les servos qui actionnent le mécanisme d’inclinaison des roues.
Comme on le voit ci-dessous, Kawasaki pourrait avoir abandonné le guidon mobile, mais envisage toujours une poignée d’accélérateur conventionnelle et un levier de frein à commande manuelle (illustré ci-dessous). Cependant, l’image ci-dessus, montrant la moto dans les virages à gauche et à droite, relève également un problème avec cette idée – la main du pilote placée sur l’accélérateur tourne autour de la barre pendant qu’il doit être mobile dans différentes directions. Espérons que cela sera résolu avant que le projet aille beaucoup plus loin. Le brevet décrit également une deuxième version du système avec des accélérateurs positionnés sur les guidons gauche et droite, où la position moyenne des deux est utilisée pour juger de la quantité de gaz que le pilote veut réellement.
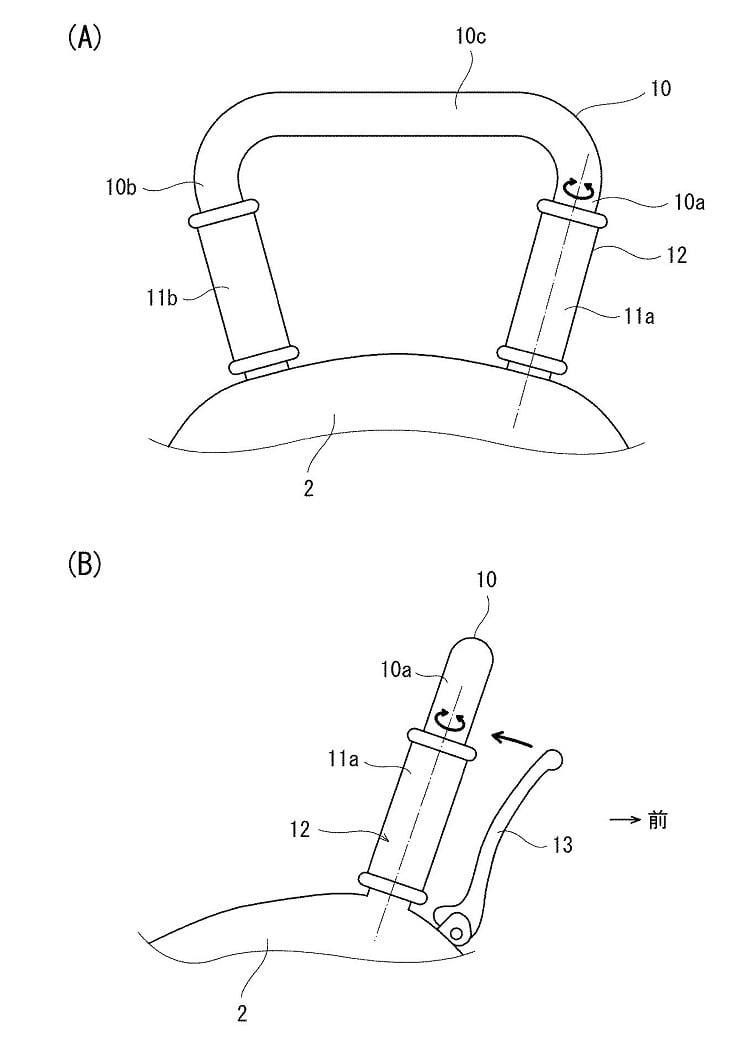
Les guidons ne bougent pas, mais au moins les commandes des gaz et des freins sont familières
Bien sûr, Kawasaki n’est pas sur le point de lancer en production une moto qui ressemble à ceci, mais il est néanmoins fascinant de voir comment les ingénieurs R&D de l’entreprise pensent. Le système de roues inclinables est clairement la principale source d’intérêt ici, mais il est intéressant de noter qu’il n’est pas aussi innovant qu’il n’y paraît au premier abord. Honda a breveté plusieurs modèles avec une pensée similaire dans les années 80 et 90. Ceux-là n’ont jamais vu le jour. Est-ce que celui-ci sortira ? La réponse dans quelques années !