Les systèmes de détection des angles morts sont omniprésents sur les automobiles d’aujourd’hui. En ce qui concerne les deux-roues, la Ducati Multistrada V4 S a été la première moto à proposer cette technologie en 2021. Alors que les dispositifs de surveillance informent les conducteurs et les motards des dangers potentiels, les systèmes laissent encore place à l’erreur humaine. Les nouvelles technologies de Véhicule To Véhicule (V2V) et de Véhicule To Everything (V2X) visent à combler cette lacune et à limiter les accidents.
Si les systèmes avancés d’aide à la conduite (ADAS) se démocratisent et équipent aujourd’hui bon nombre de véhicule sur le parc français, et jouent un rôle positif dans la sécurité des usagers de deux-roues motorisés en venant éviter certaines situations à risque, leur performance reste conditionnée par la portée de détection des capteurs utilisés (caméras, radars). En outre, leur efficacité se dégrade en cas d’obstacle entre le véhicule et l’objet du danger.
Si nous nous intéressons au contexte, les motards restent malgré tout surreprésentés dans la mortalité, car les aides sont limitées par le comportement des autres usagers. En effet, lorsque l’autre usager est à l’origine du conflit, l’analyse de procès-verbaux d’accidents corporels révèle que dans 63 % des cas, ce dernier ne détecte pas la moto.

L’apparition des technologies de connectivité offre alors la possibilité d’augmenter le champ de détection autour des véhicules. Un projet de recherche piloté par l’UTAC CERAM et financé par la Fondation MAIF propose d’utiliser les technologies permettant à des véhicules de communiquer entre eux pour réduire cette sinistralité, et plus particulièrement pour éviter les collisions entre motos et autos.
Cela fait plus d’une décennie que les constructeurs et équipementiers travaillent au développement des systèmes de communication entre les véhicules, V2V (Vehicle to Vehicle), mais aussi V2X (Vehicle to Everything).

Grâce à des technologies de communication intervéhiculaire, un signal est envoyé aux conducteurs (voiture et/ou moto) lors d’un risque potentiel de collision. Le calcul de la probabilité de la collision se fait à partir des positions et des vitesses instantanées des véhicules. Il s’agit dans un premier cas d’avertir le conducteur et de le laisser réagir par lui-même. Une fois que l’alerte a été envoyée, en cas d’absence de réaction du conducteur de la voiture, un automate embarqué prend les commandes pour éviter la collision. Dans ce cas la technologie permet au véhicule de réagir par lui-même au plus tôt. On s’affranchit alors du temps de réaction du conducteur (1,2 secondes) entre sa réception d’une alerte et son action finale sur le véhicule pour éviter le danger.
Pour résumer, l’objectif est que chaque véhicule soit en liaison avec son environnement pour l’analyser et le comprendre afin d’interagir au mieux avec lui. C’est d’ailleurs ce qui va permettre d’augmenter les niveaux d’autonomie des véhicules. Puisque l’on est entré dans une ère où l’on peut partager en direct sa localisation à ses proches, pourquoi ne pas mettre cette connectivité au service de la sécurité.
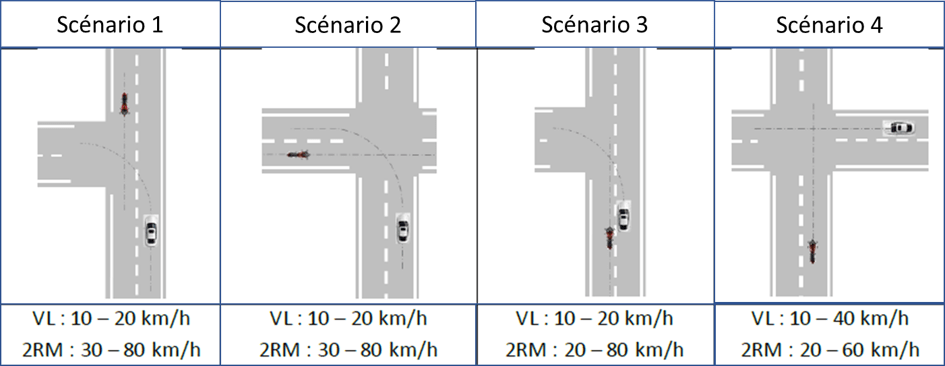
Quatre scénarios d’accidents types ont été définis. Parmi eux, la voiture qui tourne à gauche et coupe la route au motard arrivant en sens inverse ou encore le non-respect de la priorité à droite à un carrefour, ont ainsi permis de tester l’efficacité de la communication V2X sur le centre d’essai de Linas-Montlhéry.
Dans le cas présent, le système émet une alerte au conducteur de la voiture quand il détecte l’arrivée d’une moto pour permettre à celui-ci de réagir. Si ce n’est pas le cas, alors le véhicule à 4 roues freine automatiquement. A l’inverse, une moto équipée du même système V2X n’intervient pas automatiquement dans la même situation, pour éviter de provoquer une perte d’équilibre voire une chute.
« Le V2X a un grand potentiel en termes de sécurité routière pour les motocyclistes », a noté Théo Charbonneau, directeur des activités du projet UTAC CERAM Millbrook. « Elle réside notamment dans sa capacité à les percevoir dans le flux de la circulation pour informer les véhicules et les laisser réagir, en priorité, qui ont tendance à être plus stables sur la route. »
Ce système d’interconnectivité représente ainsi le futur de la sécurité, concernant la diminution de l’accidentalité, un futur qui se rapproche puisque l’organisme Euro NCAP prévoit de débuter les évaluations de ces systèmes à partir de 2025.